1. Projektdateien
Um nicht von Null beginnen zu müssen, haben wir bereits einige Dateien vorbereitet, die uns als Grundlage für die Projekte dienen werden. Darin finden sich für verschiedene Bauteile Codebeispiele mit Erklärungen.
- Code auf github.com, dort befinden sich die Dateien in verschiedenen Ordnern.
- Download als .zip Datei, um die Dateien in die Arduino IDE zu laden und auf den Microcontroller zu übertragen.
2. Projekte – Inputs
Für eure eigenen Projekte stehen euch verschiedene Elemente bzw. Bauteile zur Verfügung, die ihr mit dem Microcontroller verbinden und dadurch steuern oder auslesen könnt. Diese gliedern sich in Input (z.B. Sensoren) und Output (z.B. LEDs).
Ein "Input" ist ein Signal oder eine Information, die in den Microcontroller eingegeben oder eingelesen wird. Typischerweise werden Inputs in Form von elektrischen Signalen oder Spannungen bereitgestellt. Diese können von verschiedenen Quellen stammen wie z.B. Sensoren, Tasten, Schaltern oder anderen Microcontrollern.
2.1 Time of Flight (TOF) Distanz Sensor
- Pfad:
projects/inputs/input_TOF
Ein Time of Flight Sensor berechnet den Abstand zu einem Objekt durch Messung der Zeit, die das Licht braucht, um vom Sensor zum Objekt und wieder zurück zu kommen.
WICHTIG: In der Arduino IDE muss noch "Adafruit_VL53L0X" installiert werden.
- Auf den "Library Manager" klicken (ganz links das Icon mit den Büchern)
- Nach "Adafruit_VL53L0X" suchen
- Installieren

Für beide folgenden Beispiele nutzen wir diesen Schaltkreis:
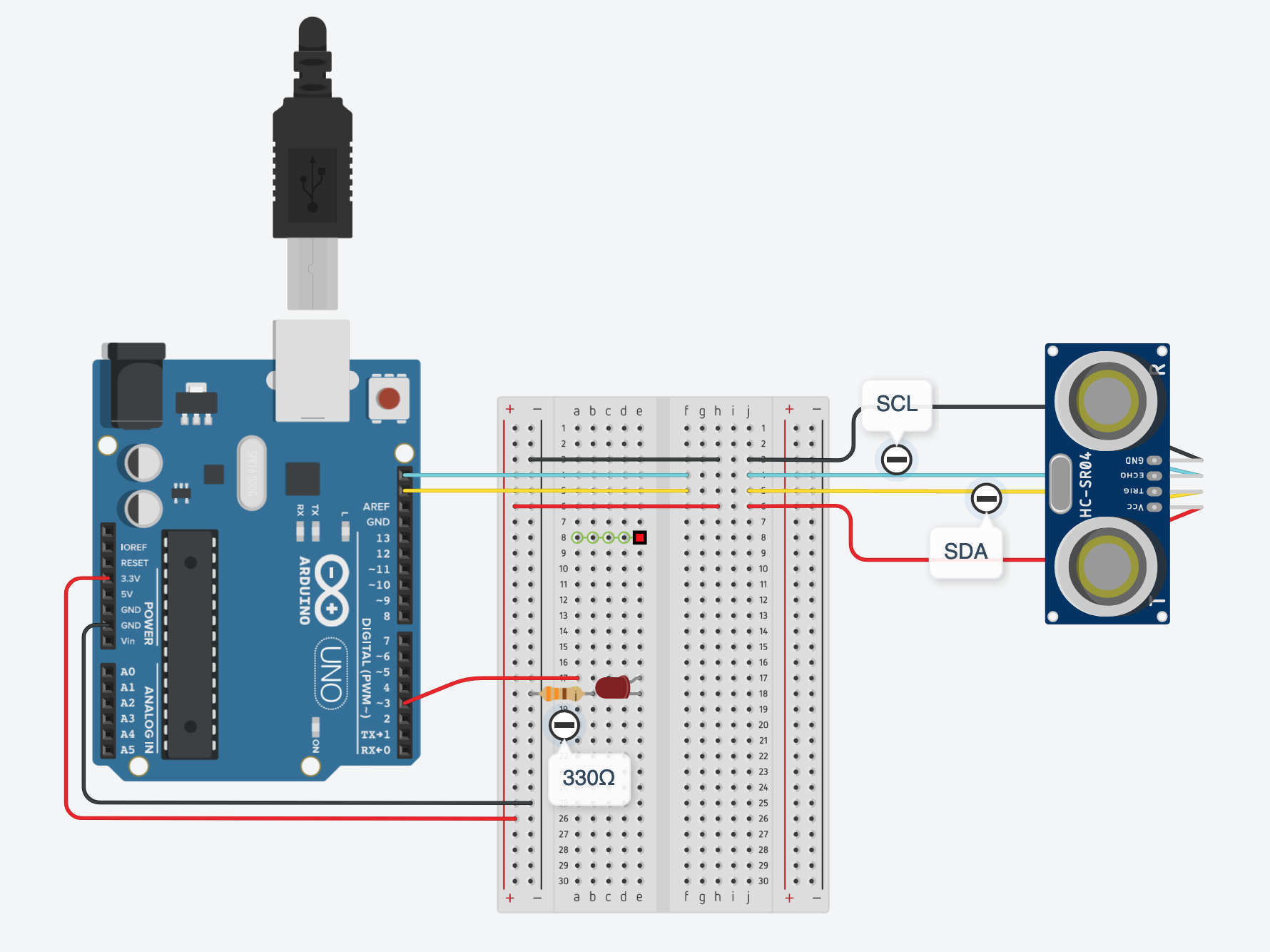
Pinbelegung

Die Pins sind von links nach rechts wie folgt belegt:
- GND
- 5V
- G26/SCL (Clock)
- G36
- G0/SDA (Data)
- BAT
- 3V3
- 5V
2.1.1 Eine gemessene Distanz am Monitor auslesen
- Pfad:
projects/inputs/input_TOF/input_TOF_output_Serial
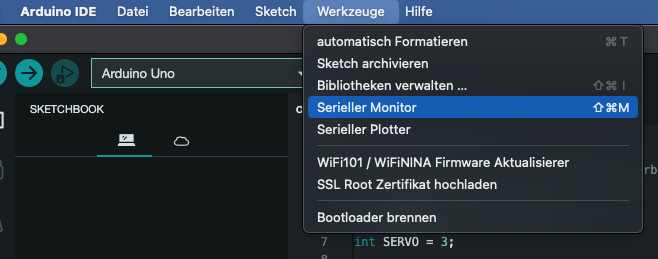
Um den gemessenen Abstand zu sehen, müssen wir das Messergebnis des Sensors zunächst vom Microcontroller an den Computer senden. Dies erfolgt über eine sogenannte "serielle Schnittstelle", also USB (Universal Serial Bus). Dort können wir es auf dem seriellen Monitor der Arduino IDE sehen.
2.1.2 Distanzabhängig eine LED ein- und ausschalten
- Pfad:
projects/inputs/input_TOF/input_TOF_output_LED
Wir können auch eine Reaktion auslösen, sobald die Distanz unter einen gewissen Wert (z.B. 2 cm) fällt. Wenn sich ein Objekt wie z.B. eine Hand nahe genug am Sensor befindet, leuchtet die LED.
2.2 Kapazitiver Touch Sensor
- Pfad:
projects/inputs/input_Touch
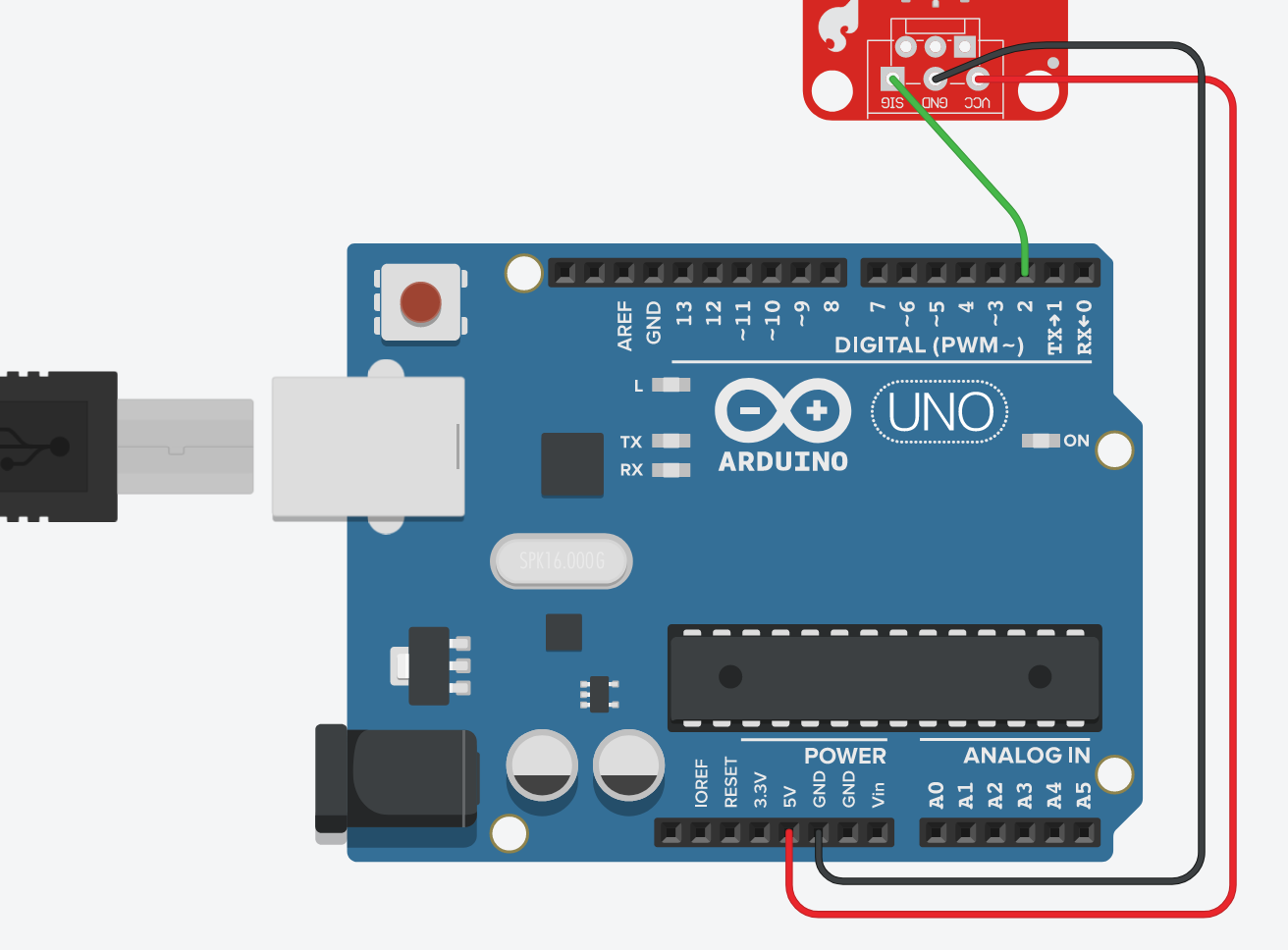
Ein kapazitiver Touch-Sensor funktioniert auf der Basis von Körperkapazität und Elektrostatik. Wenn ein menschlicher Finger die Oberfläche des Sensors berührt, ändert sich die Kapazität des elektrischen Feldes, da der menschliche Körper selbst als elektrischer Leiter wirkt. Diese Änderung wird vom Sensor erkannt und als Berührung interpretiert.
Der Sensor ähnelt im Anschluss und in der Ansteuerung durch Code einem Taster bzw. Button.
2.2.1 Sensor am Seriellen Plotter auslesen
- Pfad:
projects/inputs/input_Touch/input_Touch_output_Plotter
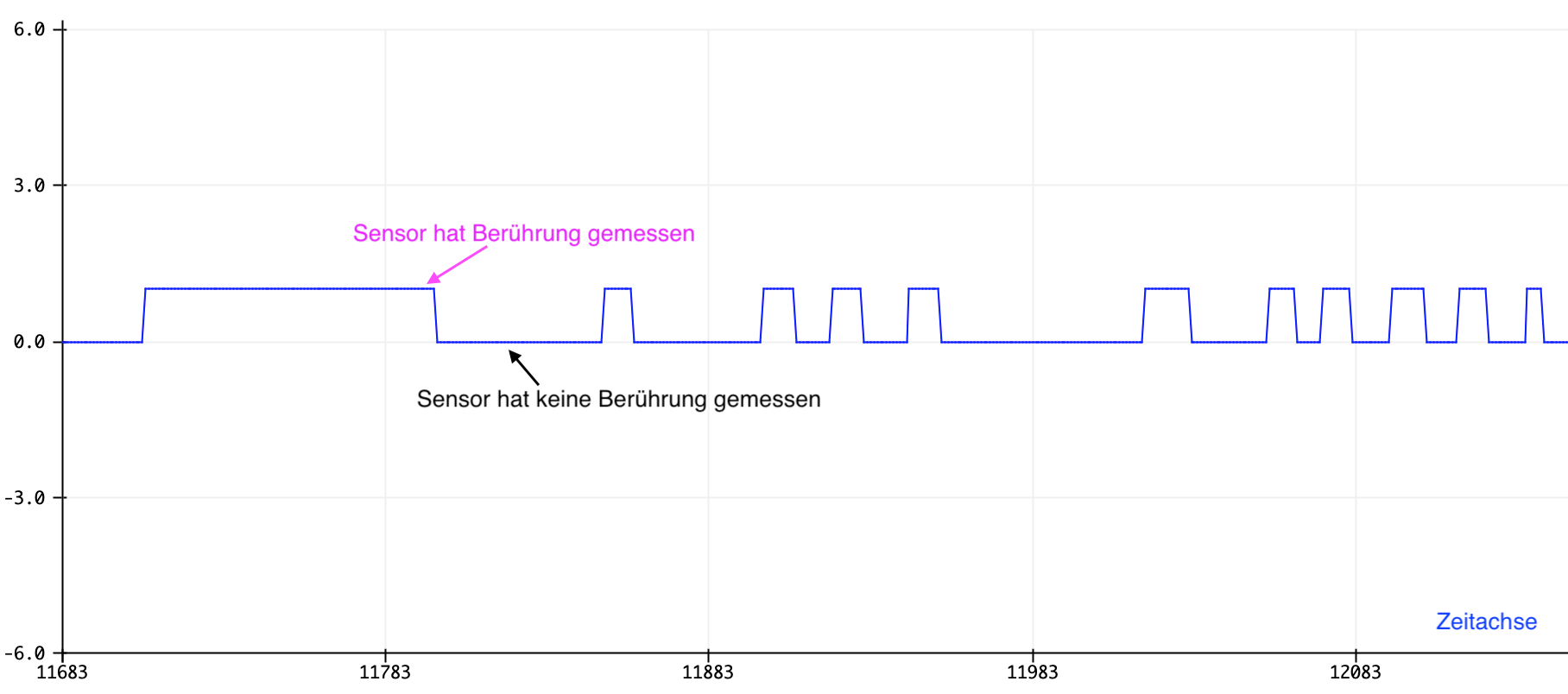
Um zu testen ob der Sensor eine Berührung wahrnimmt, können wir den Seriellen Plotter der Arduino IDE nutzen. Wenn wir den Arduino dann mit einem Computer verbinden, können wir auf dem Seriellen Plotter der Arduino IDE das Ergebnis der Messung sehen. Wenn wir den Sensor berühren, sehen wir einen Wechsel von 0 auf 1, so wie wir es im Code festgelegt haben.
2.2.2 Berührungsabhängig eine LED ein- und ausschalten
- Pfad:
projects/inputs/input_TOF/input_Touch_output_LED
Wir können auch eine Reaktion auslösen sobald der Sensor eine Berühung wahrnimmt. Wenn wir den Sensor berühren, leuchtet die LED.
Dazu erweitern wir unseren Schaltkreis um eine LED und einen Widerstand:
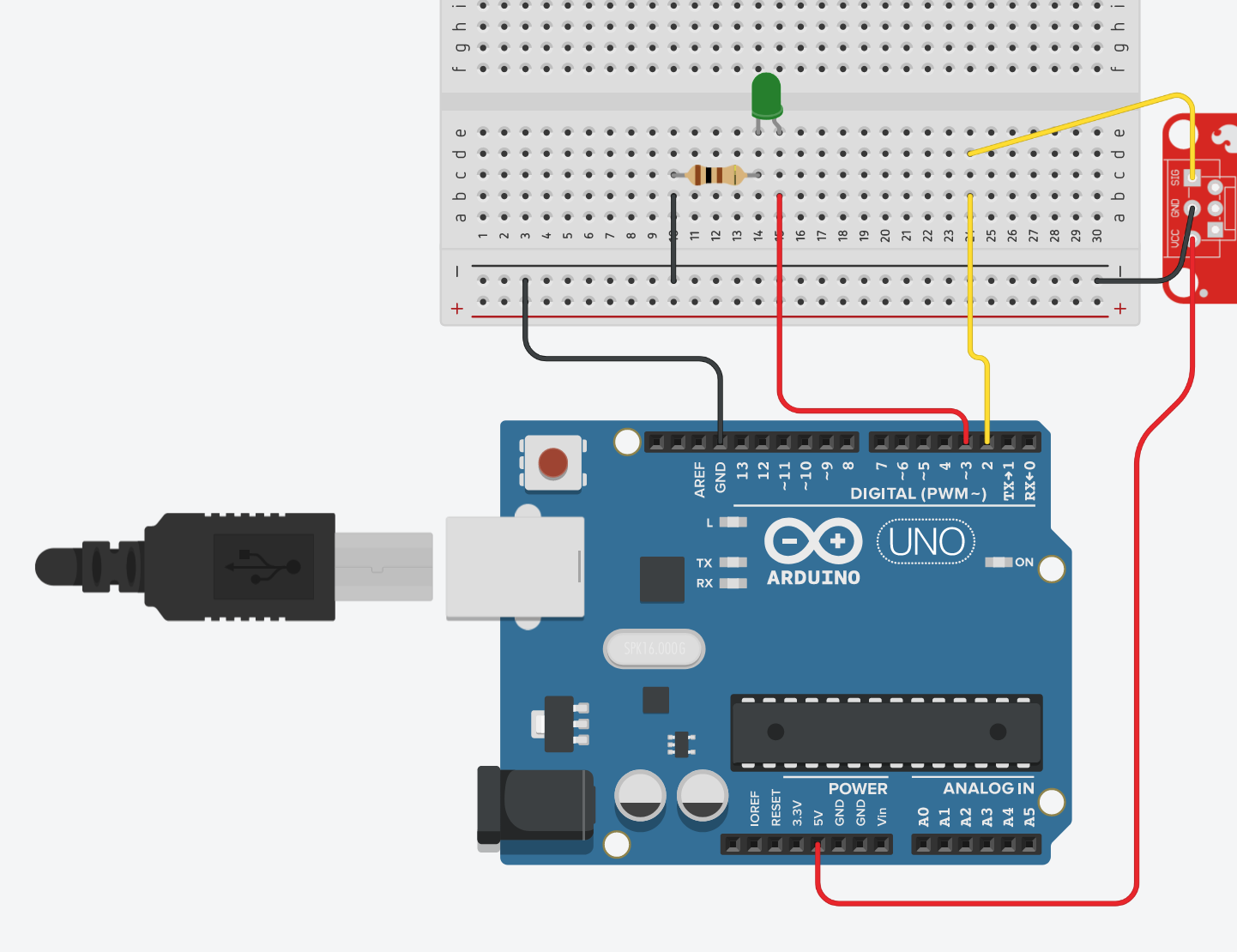
2.3 Gestenerkennung
- Pfad:
projects/inputs/input_gesture - Weitere Infos: https://wiki.seeedstudio.com/Grove-Gesture_v1.0/#play-with-arduino
- Die Verbindung mit dem Arduino erfolgt analog zum Time-of-Flight Sensor:
- Schwarz / GND => GND
- Rot / 5 V => 5 V
- Gelb / SCL => SCL
- Weiß / SDA => SDA
Achtung, die Farben beziehen sich auf die Kabelfarben! 1
Falls die Verbindung zum Sensor unterbricht, sollten Pull-Up Widerstände eingefügt werden. Das machen wir bei Bedarf am besten gemeinsam.
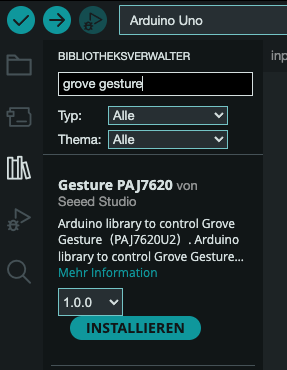
WICHTIG: In der Arduino IDE muss noch "Gesture PAJ7620" installiert werden.
- Auf den "Library Manager" klicken (ganz links das Icon mit den Büchern)
- Nach "Gesture PAJ7620" oder "grove gesture" suchen
- Installieren
2.4 Neigungs- und Rotationssensor
- Pfad:
projects/inputs/input_IMU - Weitere Infos zur Bibliothek: https://github.com/LiquidCGS/FastIMU/
- Die Verbindung mit dem Arduino erfolgt analog zum Time-of-Flight Sensor:
- Schwarz/ GND => GND
- Rot/ 5 V => 5 V
- Gelb/ SCL => SCL
- Weiß/ SDA => SDA
Achtung, die Farben beziehen sich auf die Kabelfarben! 1
Falls die Verbindung zum Sensor unterbricht, sollten Pull-Up Widerstände eingefügt werden. Das machen wir bei Bedarf am besten gemeinsam.
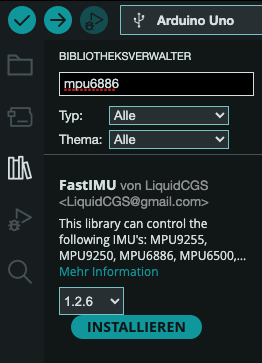
WICHTIG: In der Arduino IDE muss noch "FastIMU" installiert werden.
- Auf den "Library Manager" klicken (ganz links das Icon mit den Büchern)
- Nach "FastIMU" oder "mpu6886" suchen
- Installieren
2.5 Pulsoximeter / Herzschlag
- Pfad:
projects/inputs/input_heartrate - Weitere Infos zur Bibliothek: https://github.com/gabriel-milan/Arduino-MAX30100
- Die Verbindung mit dem Arduino erfolgt analog zum Time-of-Flight Sensor:
- Schwarz/ GND => GND
- Rot/ 5 V => 5 V
- Gelb/ SCL => SCL
- Weiß/ SDA => SDA
Achtung, die Farben beziehen sich auf die Kabelfarben! 1
Falls die Verbindung zum Sensor unterbricht, sollten Pull-Up Widerstände eingefügt werden. Das machen wir bei Bedarf am besten gemeinsam.
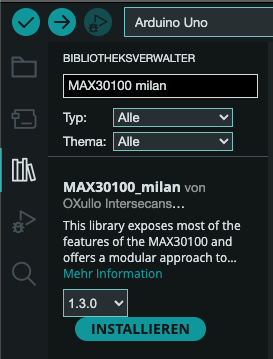
WICHTIG: In der Arduino IDE muss noch "MAX30100_milan" installiert werden.
- Auf den "Library Manager" klicken (ganz links das Icon mit den Büchern)
- Nach "MAX30100_milan" oder "MAX30100 milan" suchen
- Installieren
2.6 Infrarot Fernbedienung mit 4 Kanälen
- Pfad
projects/inputs/input_infrared - Datenblatt, Reichweite: 5 - 8 Meter
- Immer nötig, Empfänger Board => Arduino:
- GND => GND
- VCC => 5 V
- Optional, Empfänger Board => Arduino:
- 1 bis 4 Kabel von
Out1,Out1etc. => Digital Pin, zB2,3,4und5
- 1 bis 4 Kabel von
Wenn auf der Fernbedienung eine der Kanalasten (CH 1-4) gedrückt wird, wechselt der entsprechende Ausgang (OUT 1-4) von LOW auf HIGH und die entsprechende LED (H 1-4) auf dem Empfängerboard (blau) leuchtet, solange wie die Kanaltaste auf der Fernbedienung gedrückt wird. Wenn die rote Power Taste auf der Fernbedienung gedrückt wird, wechseln alle Ausgänge auf dem Empfängerboard von LOW auf HIGH und es leuchten alle LEDs, solange wie die Taste auf der Fernbedienung gedrückt wird.
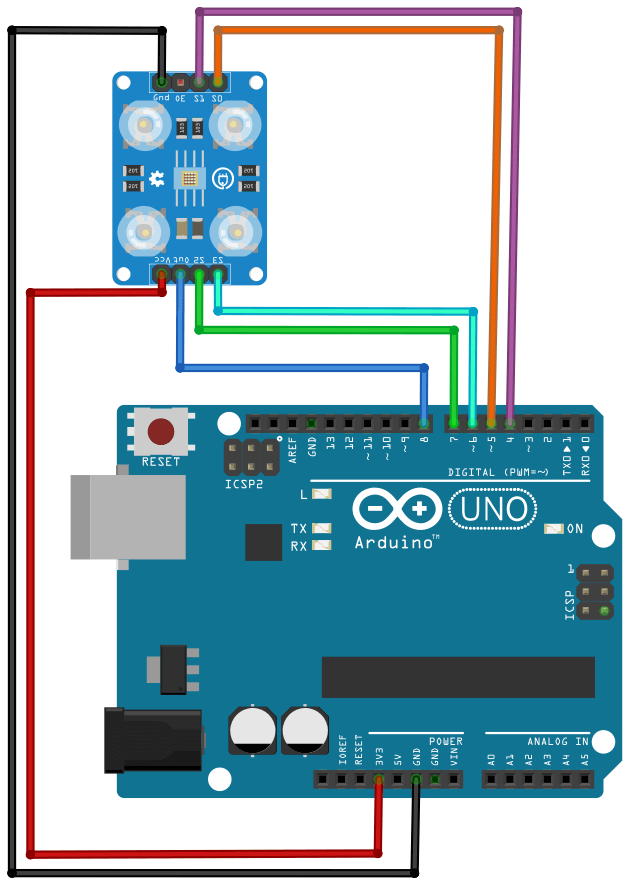
2.7 Farbsensor
- Pfad
projects/inputs/input_farbsensor - Ausführliche Anleitung und Beschreibung
Verschaltung
Funktionsweise
- Fotodioden und Farbfilter
- der Sensor ist eigentlich eine kleine Matrix, bzw. ein Netz aus Fotodioden, welche Licht aufnehmen, ähnlich wie die Pixel in einer Digitalkamera.
- Es gibt Fotodioden mit Farbfilter (Rot, Grün und Blau), die spezielle Farbanteile aus dem Licht herauszufiltern und Fotodioden ohne Filter, die das gesamte Licht messen.
- Licht in Signale umwandeln
- Das Licht wird durch den sogennaten "Strom-Frequenz-Wandler" in elektrische Signale umgewandelt. Es wird gemessen, wie viel Licht ankommt, dies wird als Frequenz ausgegeben.
- Je mehr Licht auf eine Fotodiode trifft, desto schneller flackert das Signal (höhere Frequenz).
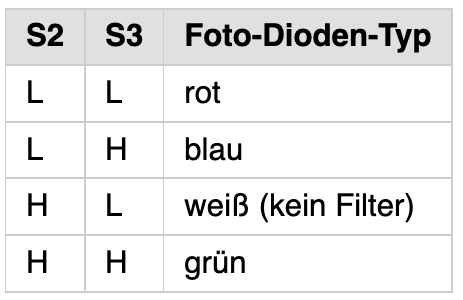
- Erkennen von Farben
- Um eine spezifische Farbe zu erkennen, nutzt der Sensor die PINs S2 und S3. Diese PINs steuern, welche der Farbfilter-Fotodioden aktiv sind.
2.8 Weitere Inputs
Natürlich stehen euch auch alle weiteren Inputs aus den Fundiono-Koffern der Schule zur Verfügung. Dazu zählen z.B. Temperatursensoren, Feuchtigkeitssensoren oder Tastenfelder.
3. Projekte – Outputs
Ein "Output" ist ein Signal oder eine Information, die der Microcontroller generiert oder ausgibt. Es handelt sich um die Reaktion des Microcontrollers auf interne Berechnungen oder Benutzereingaben. Den Output legen wir duch den Code, mit dem wir den Microntroller programmieren, fest.
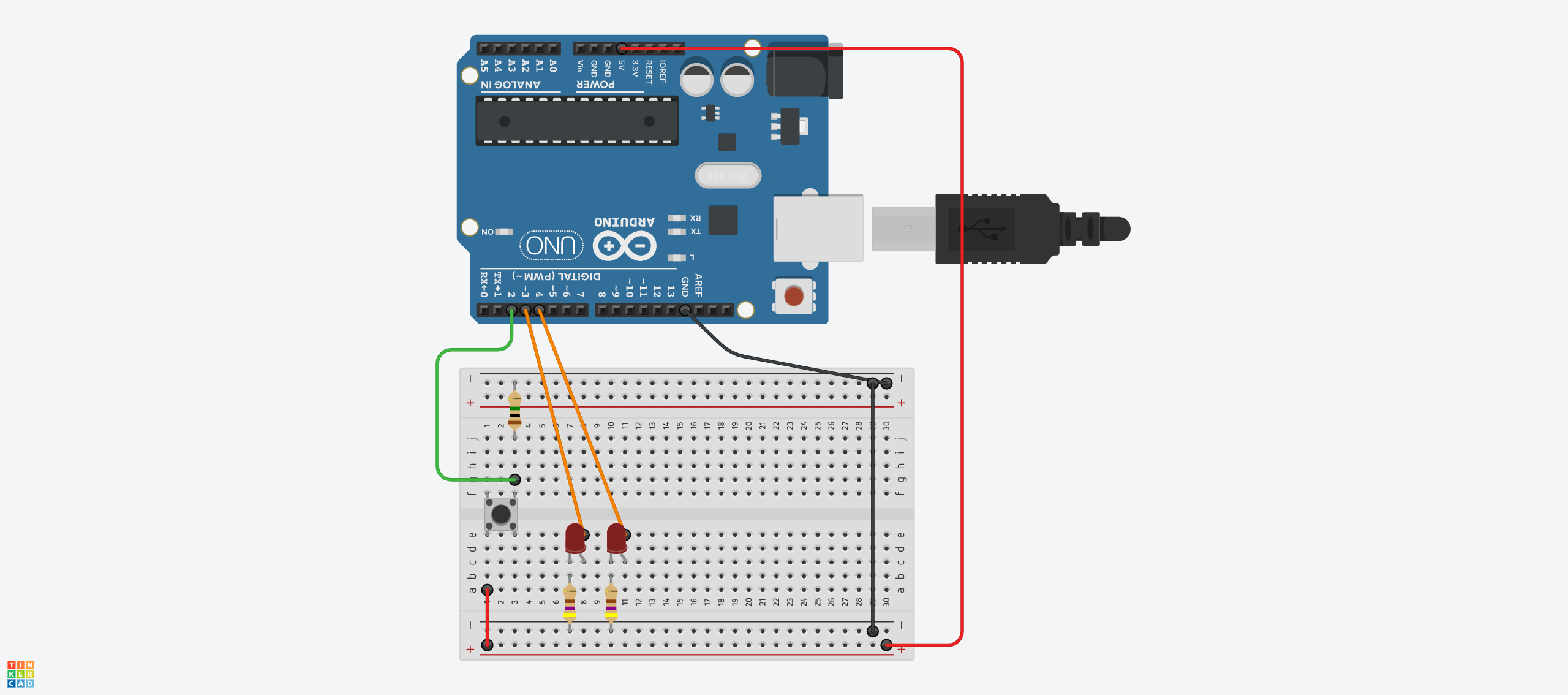
3.1 LED / 2 LEDs
- Pfad:
projects/outputs/simple_demo_leds_button
Ein Button und eine LED (bzw. später zwei LEDs) werden mit dem Arduino verbunden. Wenn der Button gedrückt wird, geht die LED an (bzw. später die andere auch aus).
3.2 LED Streifen "Neopixel"
- Pfad:
projects/outputs/simple_demo_neopixel_button
Ein Button und ein LED Streifen "Neopixel" werden mit dem Arduino verbunden. Wenn der Button kurz gedrückt wird, springt die LED eins weiter. Bei Gedrückthalten, springt die LED mit einer kurzen Verzögerung kontinuierlich weiter.
WICHTIG: In der Arduino IDE muss noch "Adafruit Neopixel" installiert werden.
- Auf den "Library Manager" klicken (ganz links das Icon mit den Büchern)
- Nach "Adafruit Neopixel" suchen
- Installieren
3.3 LED Matrix "NeoHex"
- Verbindung zum Arduino NICHT via I2C (also nicht alle 4 Kabel!), sondern wie folgt:
- Schwarz => GND
- Rot => 5V
- Weiß => Digitaler Pin am Adruino, z.B. im Beispiel Pin 2
Achtung, die Farben beziehen sich auf die Kabelfarben! 1
Wichtig In der Arduino IDE muss noch "fastled" installiert werden.
- Auf den "Library Manager" klicken (ganz links das Icon mit den Büchern)
- Nach "fastled" suchen
- Installieren
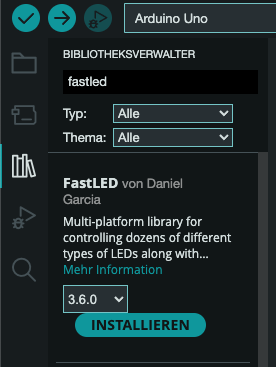
Dokumentation gibt es hier: fastled
3.4 Servo Motor
- Pfad:
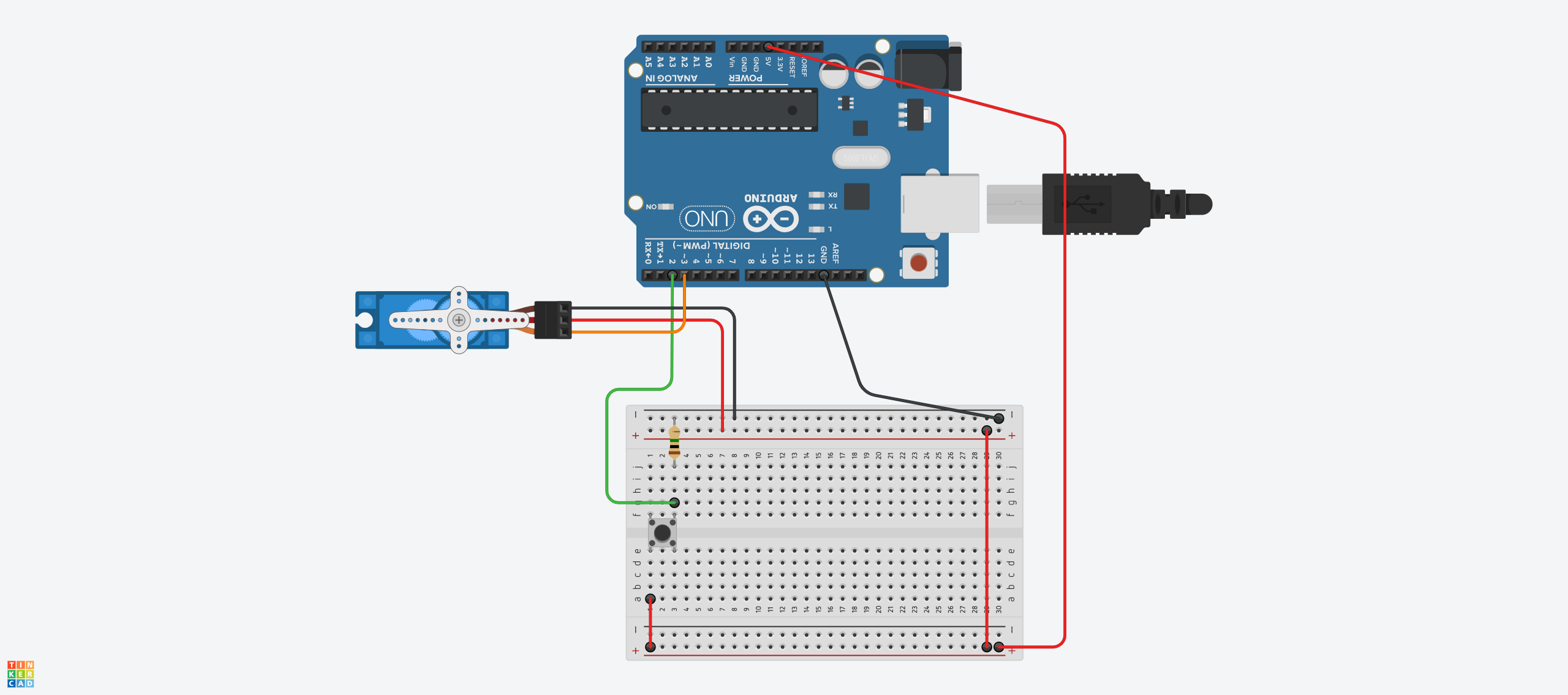
projects/outputs/simple_demo_servo_button
Ein Button und ein Servo Motor (sozusagen ein Motor, der in eine festgelegte Position gedreht werden kann und sich nicht einfach nur dreht, bis man den Strom abstellt) werden mit dem Arduino verbunden. Wenn der Button gedrückt wird, dreht sich der Servo weiter.
3.6 Wasserpumpe
Hier sind ein Input (Feuchtigkeitssensor) und ein Output (Pumpe) kombiniert.
- Pfad:
projects/outputs/input_humidity_output_pump
Verbindung
- Schwarz => GND
- Rot => 5V
- Weiß/ IN => Digitaler Pin, z.B. Pin 2 im Beispiel. Dieser schaltet die Pumpe an (HIGH) und aus (LOW)
- Gelb/ Out => Analoger Pin, z.B. Pin A0 im Beispiel. Dieser list den analogen (ADC) Wert aus, welcher bei ca. 350 liegen sollte, wenn der Sensor trocken ist.
Achtung, die Farben beziehen sich auf die Kabelfarben! 1
Funktionsweise
- Der Input des Feuchtigkeitssensors, wird vom Analog-to-Digital Converter (ADC) ausgelesen, der das analoge Signale in digitale Werte umwandelt.
- Analoge Signale repräsentieren Informationen kontinuierlich, d.h. Signale mit einer potenziell unendlichen Skala von Werten. Diese spiegeln oft natürliche, physikalische oder elektrische Zustände direkt wider, wie zum Beispiel die Spannung.
- Digitale Signale stellen Informationen in einer binären Form dar. Diese Darstellung erfolgt durch diskrete Werte, die nur bestimmte, festgelegte Zustände annehmen können. Ein digitales Signal hat also eine begrenzte Auflösung.
- Die Umwandlung von analog zu digital (wie durch einen ADC) ermöglicht es, dass analoge Signale von digitalen Systemen, wie Computern und Mikrocontrollern verarbeitet, gespeichert und übertragen werden können.
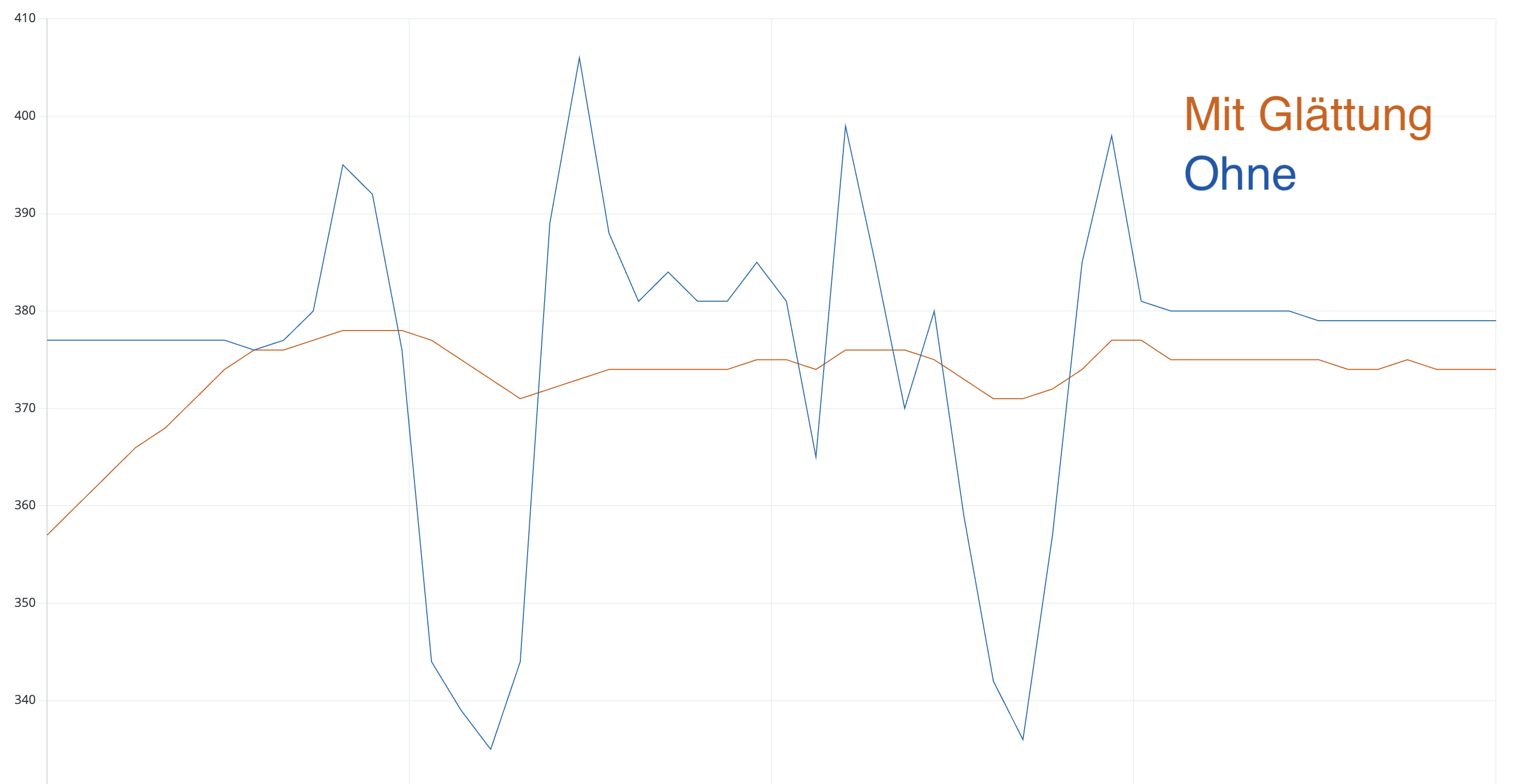
analogRead(INPUT_PIN)misst die Spannung am Pin und wandelt sie in eine digitale Zahl um, die bei Arduino zwischen 0 und 1023 liegen kann- dieser Wert kann dann verwendet werden um die angeschlossene Wasserpumpe (PUMP_PIN) zu aktivieren, muss aber eventuell geglättet werden um nützlich zu sein
3.7 Weitere Outputs
Auch weitere Outputs finden sich in den Fundiono-Koffern der Schule. Dazu zählen z.B. Lautsprecher, ein Ampelmodul oder LCD-Modul.
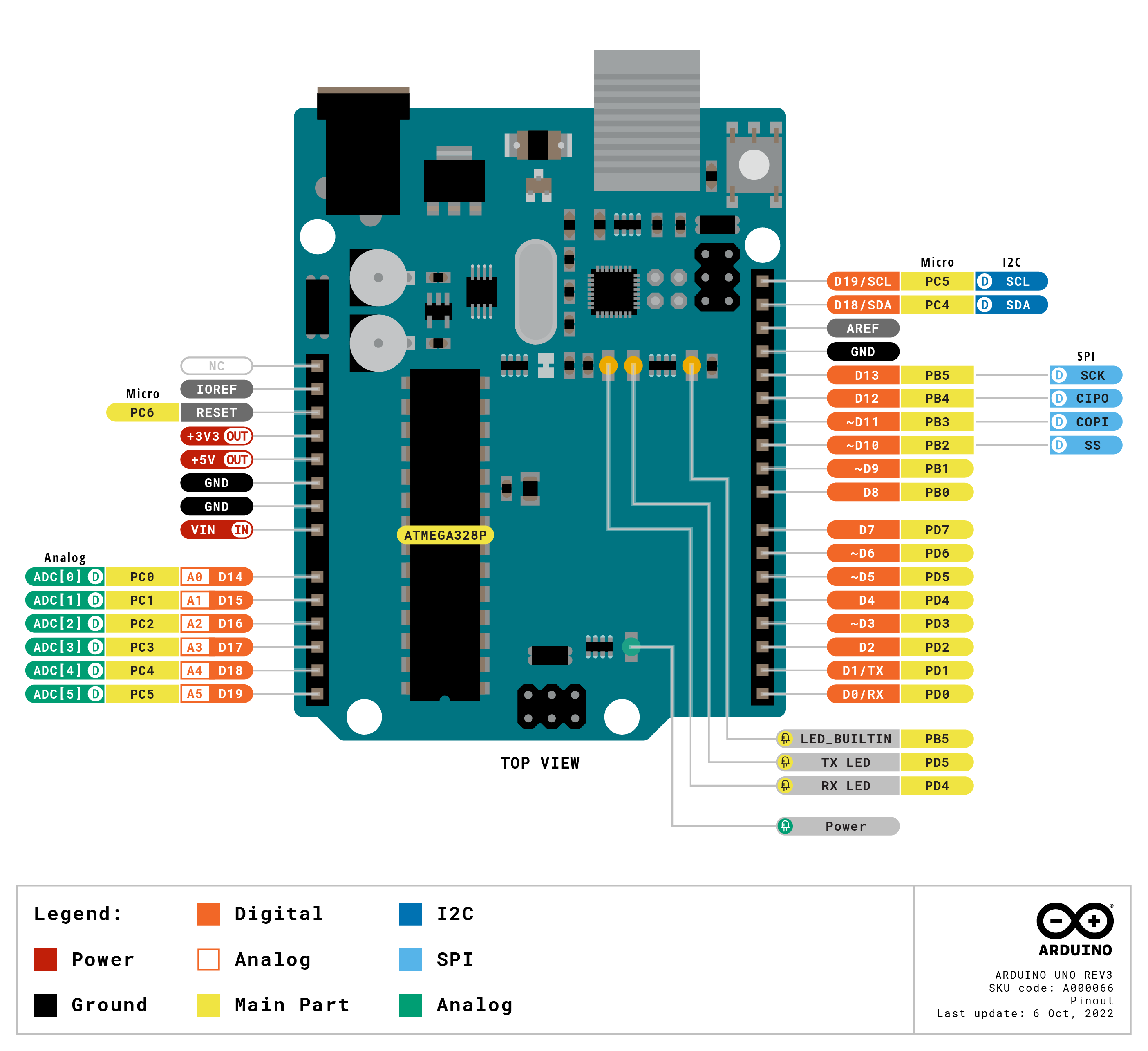
Arduino UNO Pinbelegung
Quelle: https://docs.arduino.cc/hardware/uno-rev3
Fußnoten
| Sensor Farbcodierung vs. Kabel | Zwei Kabeltypen |
|---|---|
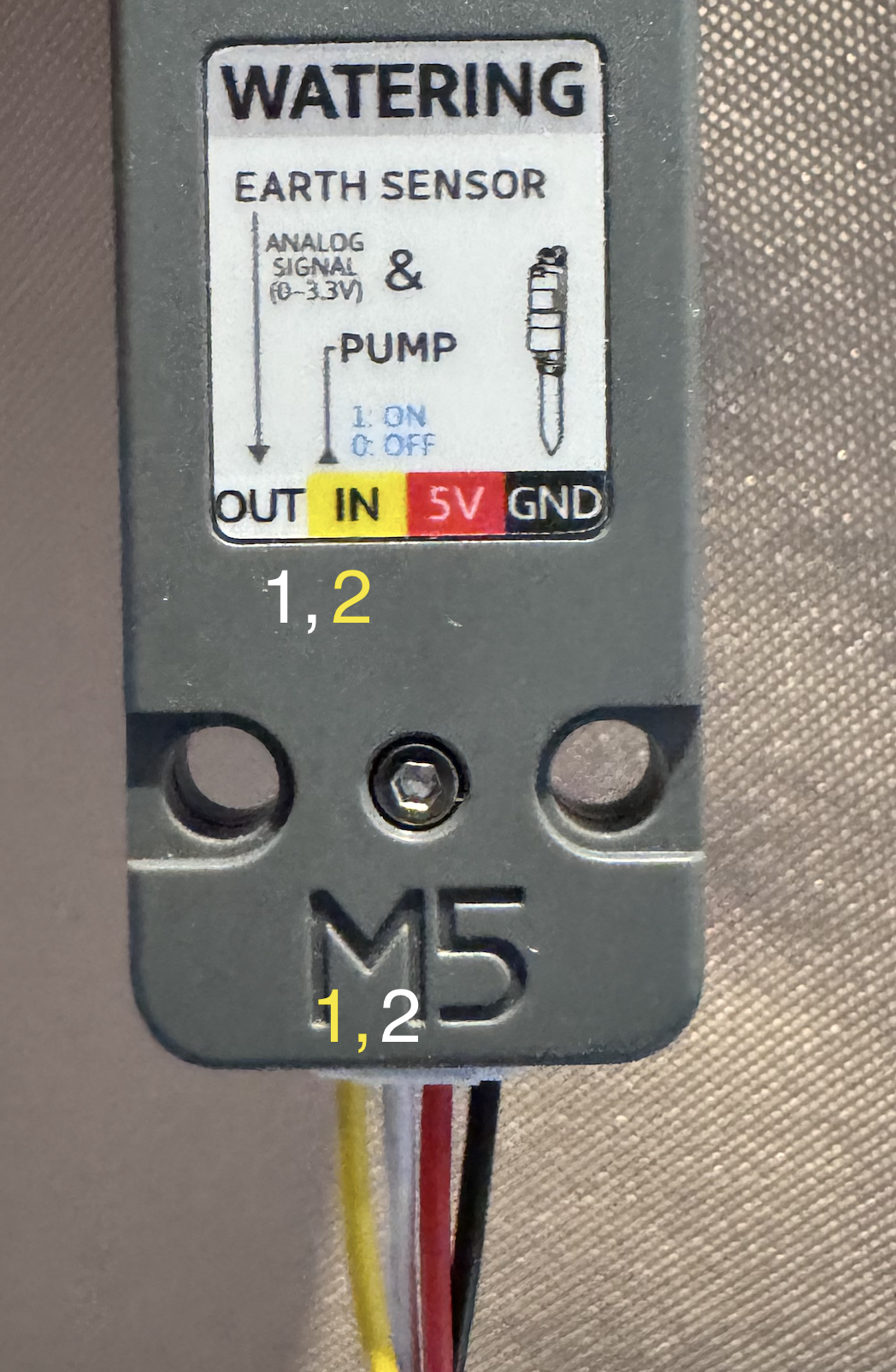 | 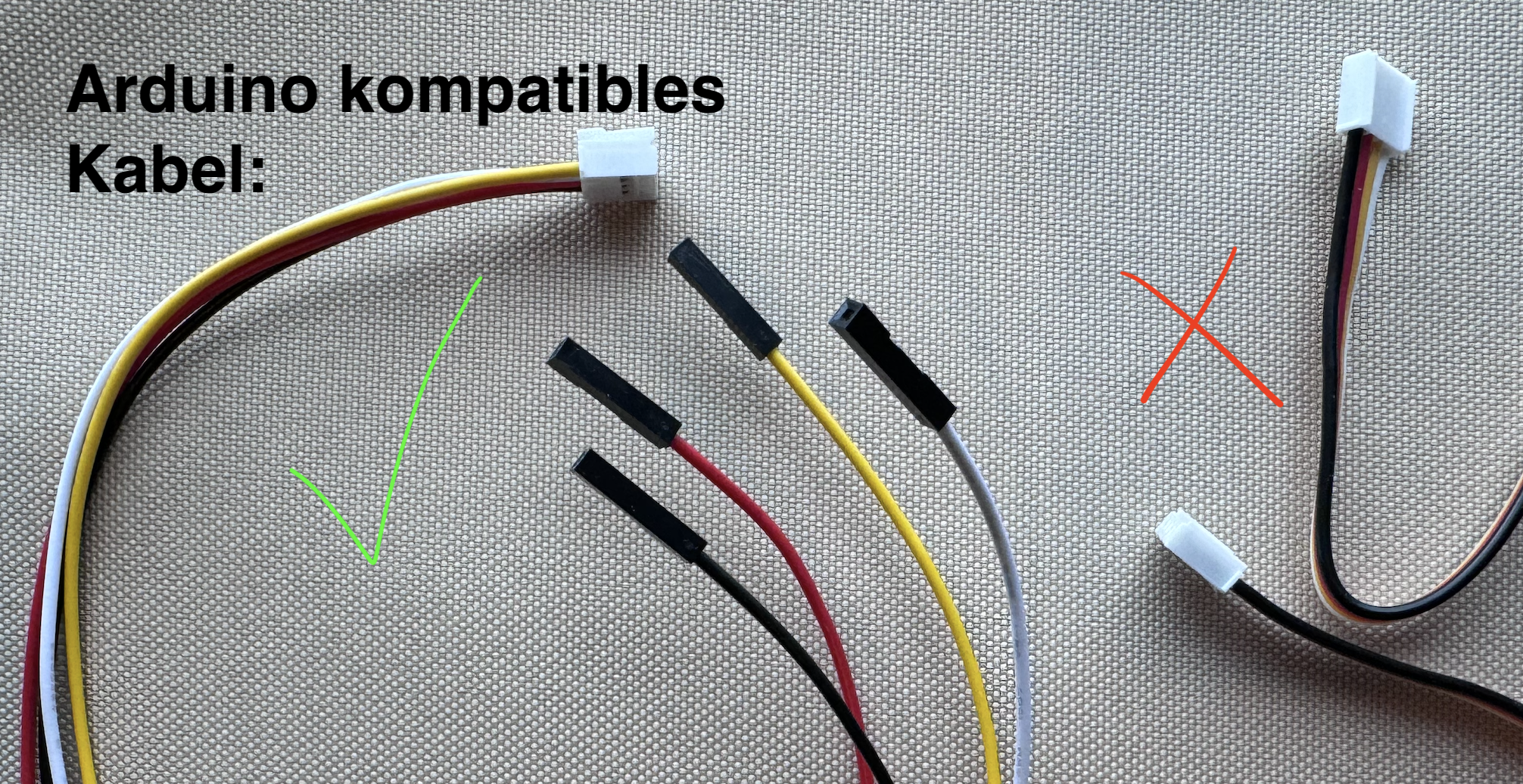 |
Die Kabelfarben Gelb und Weiß, der Kabel die sich mit dem Arduino verbinden lassen, sind im Vergleich zum Sensor-Anschluss vertauscht (Siehe Fotos).